IRISBOT
Work with Clément Bolle
Inspirations
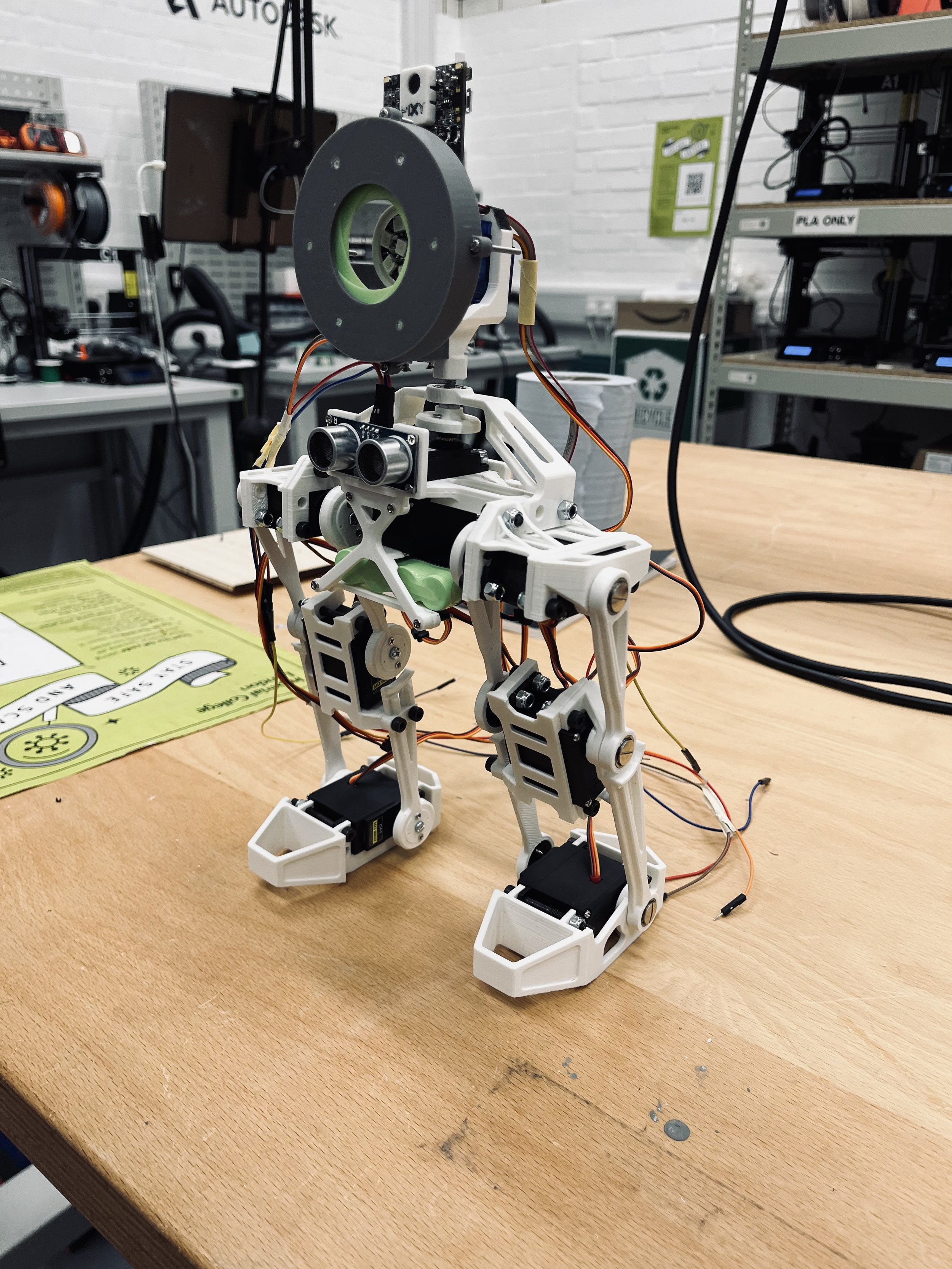
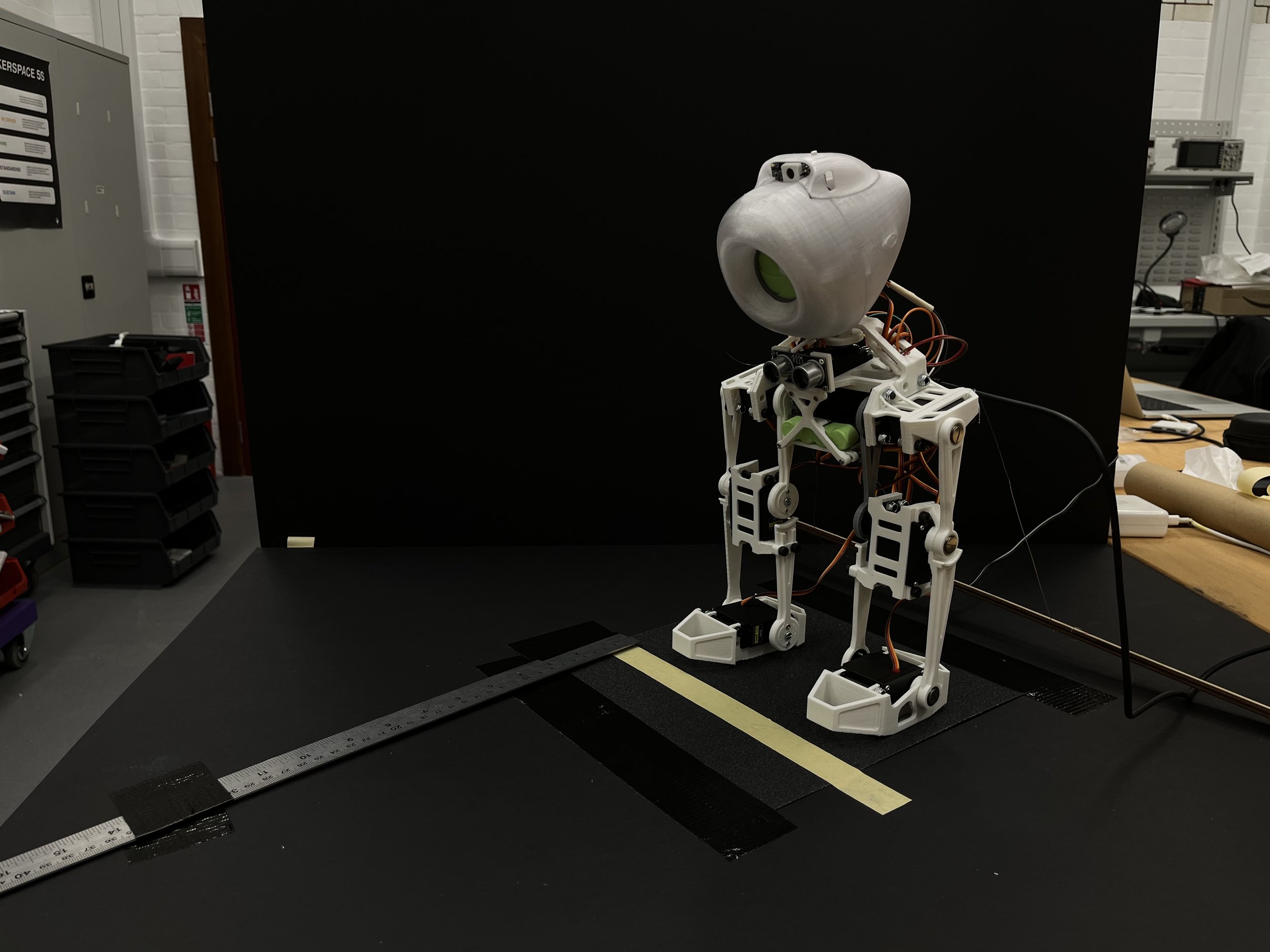
Initially inspired by the pixel lamp, Star Wars AT-ST Walker, the first generation iMac, and others, we aim to create a friendly two-legged creature with a sleek appearance that can follow simple objects or even human and make eye contact with the interactive aperture.

Iterations
During the first version, we developed an aperture and motion module. The ultrasonic sensor has been replaced by the Pixy Cam in the prototype II to allow motion capture and simple object detection. We also improved the structure by generative design and joint.


Input / Control
-
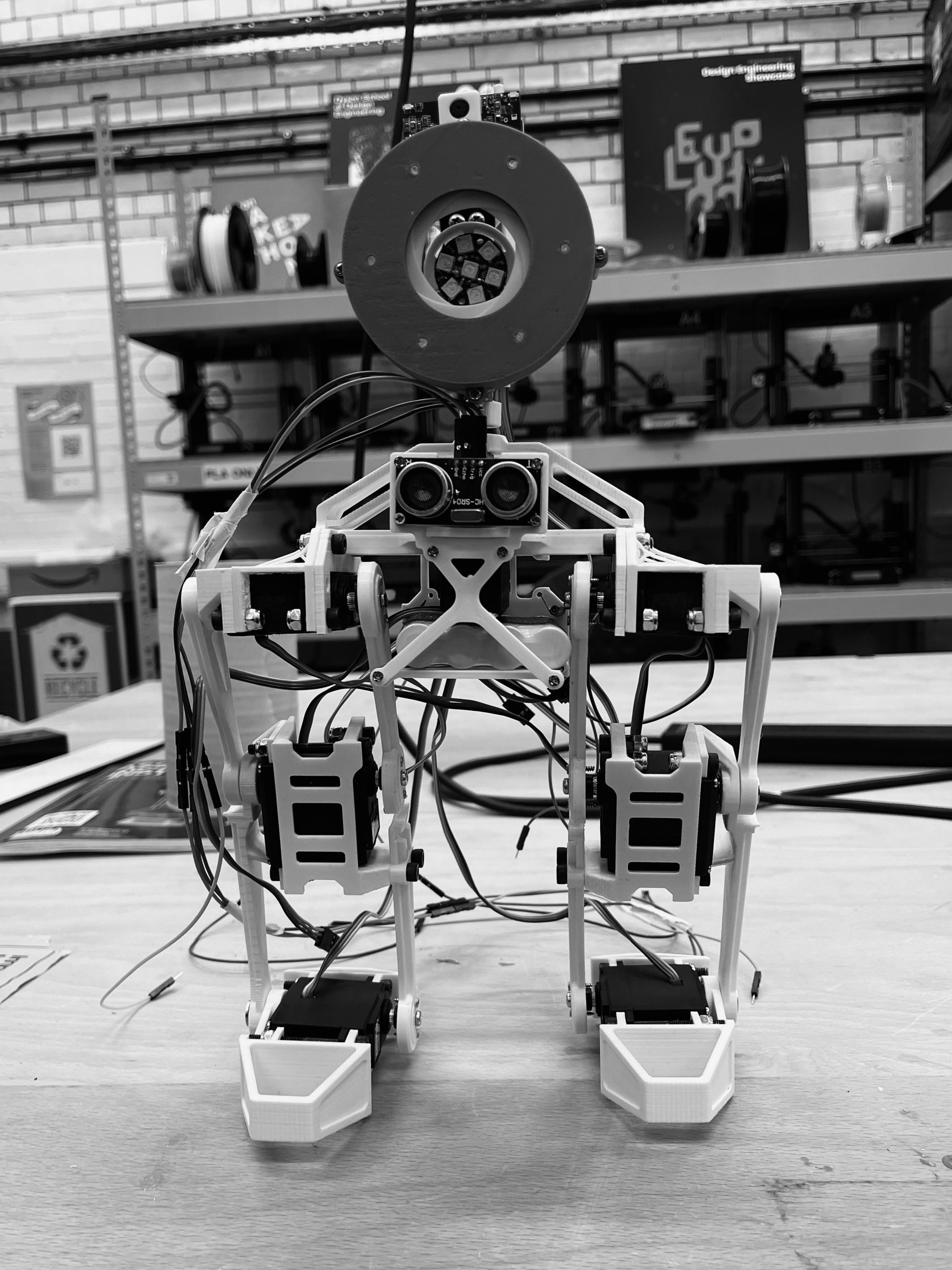
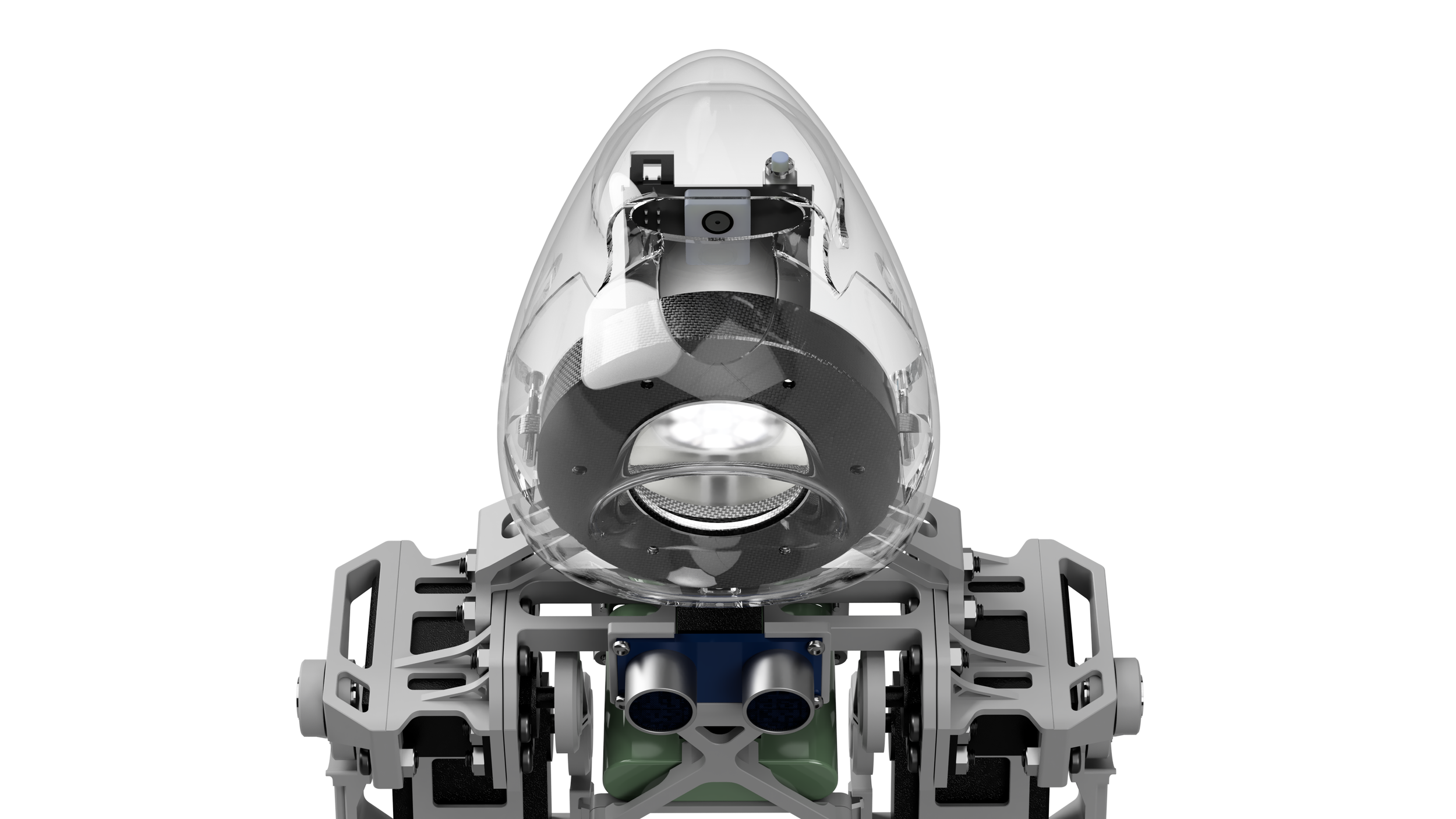
An ultrasonic sensor placed in front of the main body enables the robot to detect motion occurring in front of it. The distance between the object and the robot is calculated and used to control an aperture composed of a servo and a led panel. The data is also used to make the robot walk towards the object detected.
-
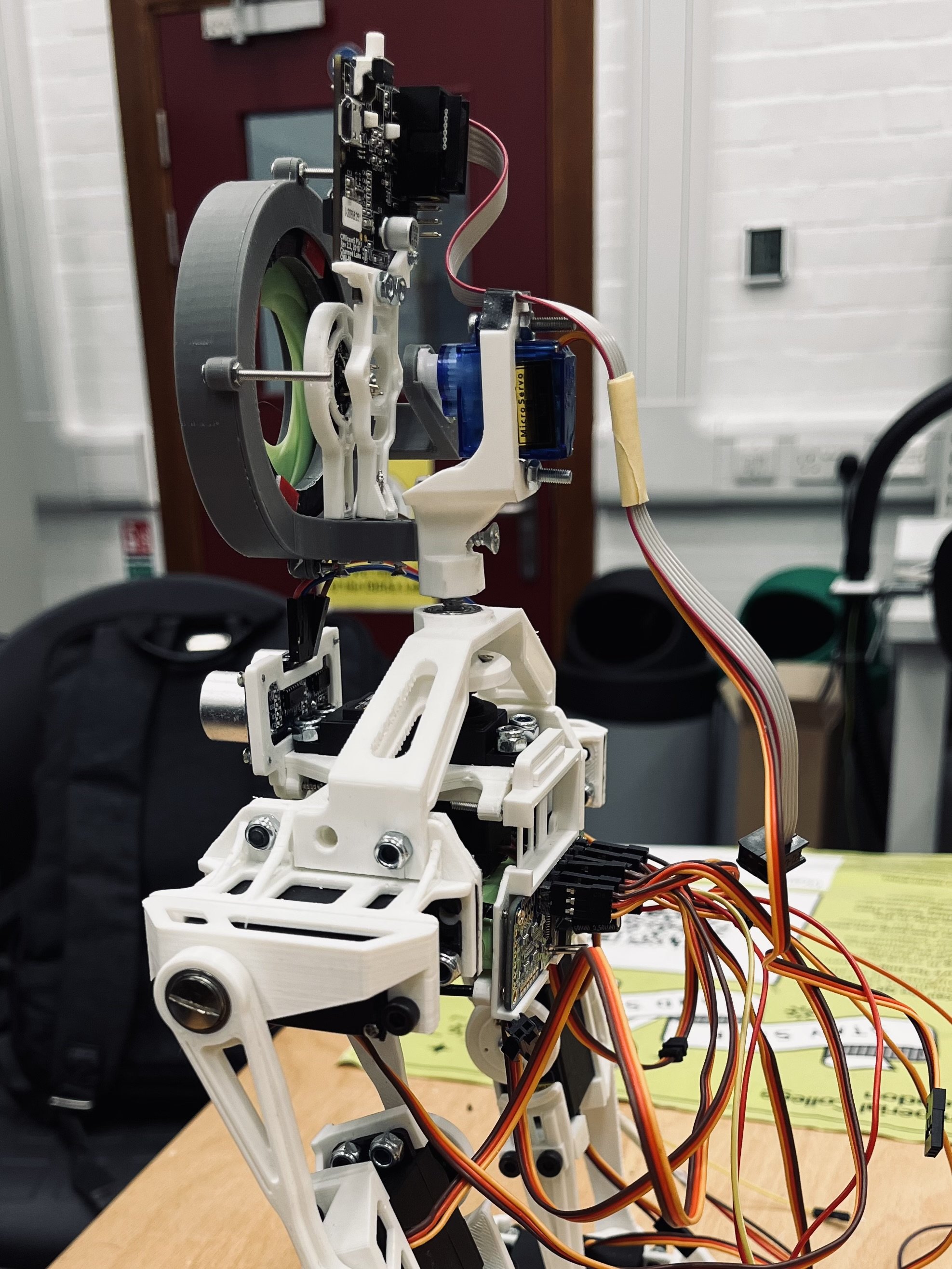
PIXY is used to recognise and follow the user's hand. The camera also controls a servo which provides a 130° pan view angle for the robot. More objects can be taught to the robot to make the interaction more playful.
-
Microcontroller: Arduino Nano 8 bits 14 (I/O)
Communication: IC2 communication (SDA/SCL)
Digital (I/O) -TTL pulse
Servo Driver PCA 16 channel to control servos
Power source: Battery pack 4.8V/2500mAh

Motion System
6 Servos Motion System: control hips, knees and feet. Fix position: sit, stand-up straight. Each servo is controlled through a servo driver which sends PWM to set the servos at specific angles.
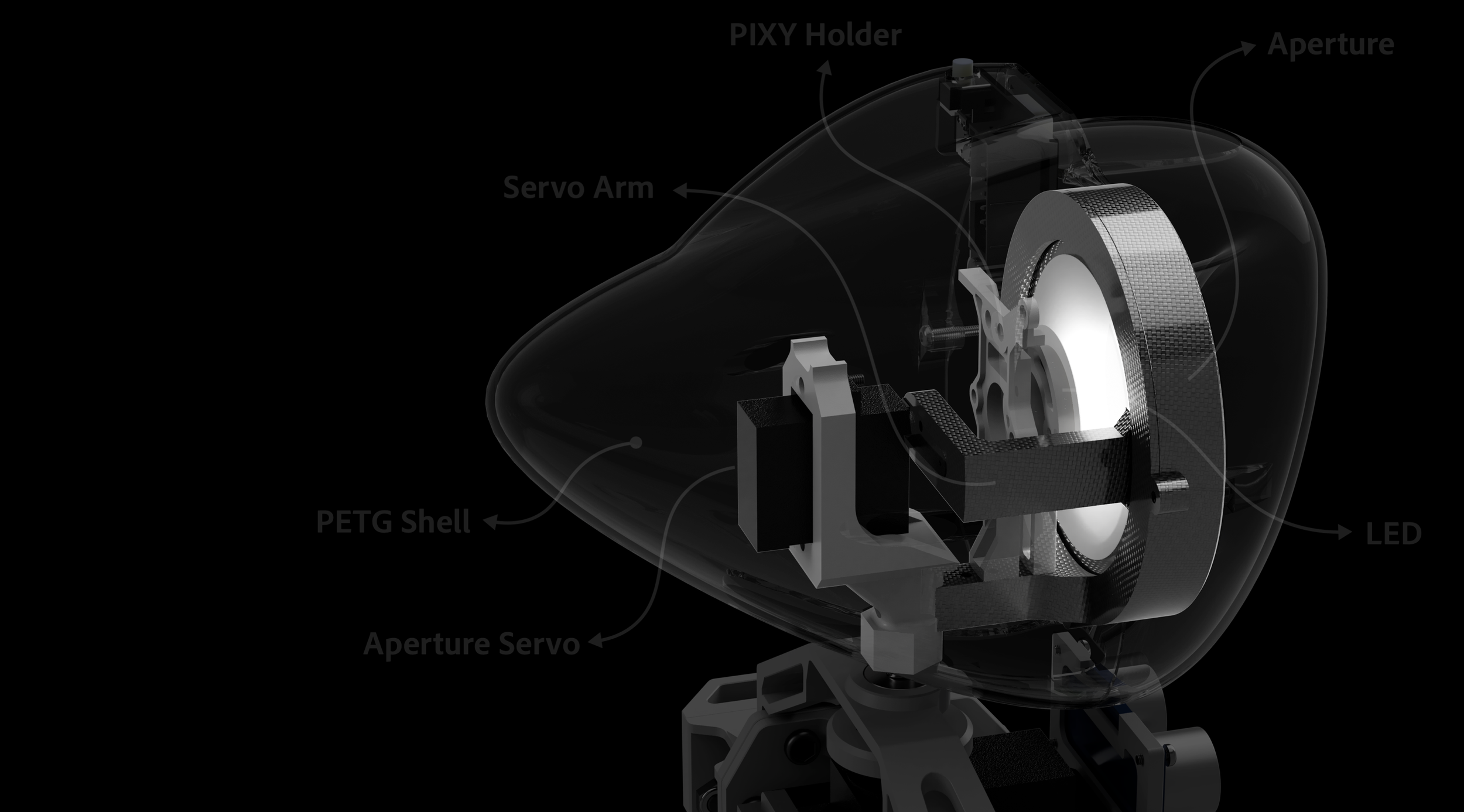
Interactive Aperture
The robot eye is represented by an aperture system also found in optical components (Iris). It is composed of a rotative mechanical part, a servo, and a programable LED panel. The system uses the ultrasonic sensor data as input to activate the mechanism.
A lighting effect is produced when an object or person enters the sensor's field of view. The speed at which the user approaches the device influences how fast the aperture reacts and lights up, creating a hypnotic effect on the user.
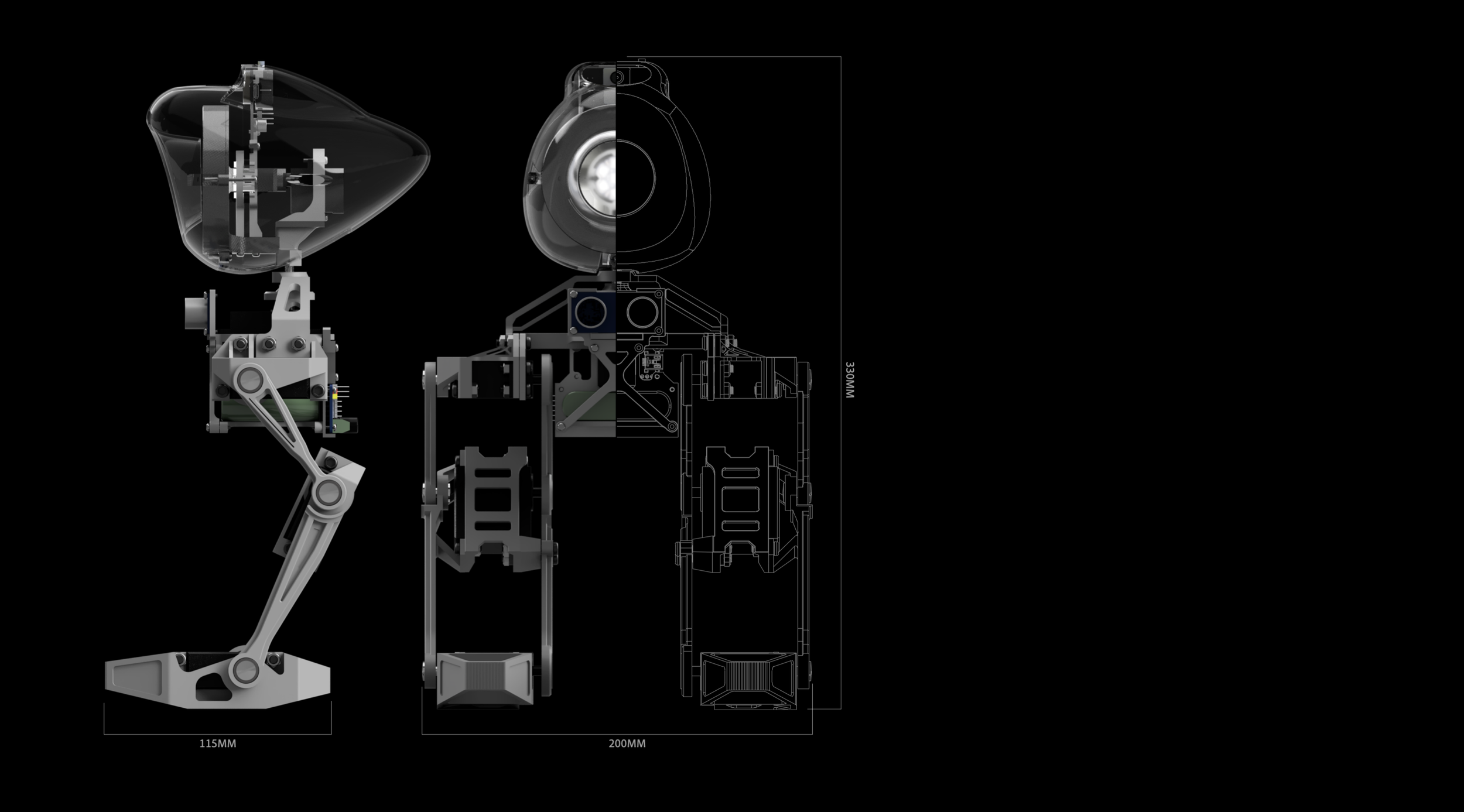
BILL OF MATERIALElectronic components: 1 X Arduino Nano V31 X Servo Driver 12 Channel 8 bits 1 X Pixy 2 camera (object recognition)7 X Servos MG996 + 1 SERVO SG90 1 X Lithium battery 5V / 2400mAh1 X LED panel adafruit WS2812 1 X ultrasonic sensor HC-SRO4Jump wiresBody Assembly:Structure (PLA) 37 X M4 bolt (hex) + Nuts18 X M2 bolt (hex) + Nuts 1 X head shell (PETG) 13 X Bearings Weight: 998g